授课研究生21 级机械工程专业 L 学长:初试成绩:360+,专业课 801:115+。有辅导经验,已辅导过的学生上岸专业课成绩 130+,对于专业课知识掌握熟练。
自由度的求解一.机构的自由度构件所具有的独立运动的数目称为自由度。一个平面运动的构件有 3 个自由度,即构件可以沿 x 坐标方向、γ坐标方向移动和绕平面上某点转动。当一个构件和其他构件组成运动副后,其自由度就会减少,这种自由度的减少就称为约束。一个高副引入一个约束,一个低副引入两个约束。机构的自由度是所有构件自由度之和减去所有约束数之和。若机构中有 n 个活动构件,P1个低副,Pa个高副,则机构自由度 F 为: F = 3n − 2PL − PH(1-1)
二. 机构具有确定运动的条件一个平面运动的构件有 3 个自由度,也就是说要确定一个构件在 xoy 平面坐标系中的位置需要三个坐标值。一个平面运动的机构有 F 个自由度,也就是说要确定一个机构中所有的构件在 xoy 平面坐标系中运动的位置需要 F 个坐标值,如果给定的坐标值少于 F,就会有某些构件的运动是不确定的乱动,如果给定的坐 标值多于 F,则机构中构件就会在过多的彼此矛盾的运动要求中被损坏或卡死。
只有当输入机构的运动坐标参数和确定机构运动中各构件位置所需要的坐标数相同时,才能保证机构有确定的运动。而把运动坐标参数输入机构的构件是原动件,原动件和机架组成低副,每个原动件的自由度都是 1(只输入一个坐标参数),因此,机构具有确定运动的条件就是:机构的自由度数与原动件数量相等。
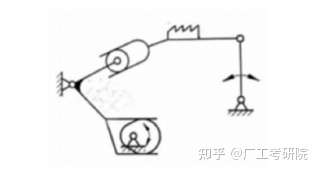
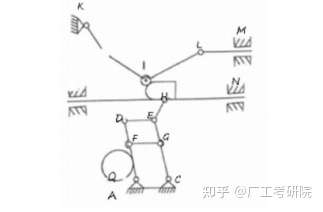
在计算中要注意三种特殊情况,即局部自由度、复合铰链和虚约束。机构中某些构件之间所产生的、对其他构件运动没有影响的局部运动的自由度称局部自由度。局部自由度常出现在把滑动摩擦变为滚动摩擦的场合,通常遇到的就是机构中的滚轮。复合铰链是两个以上构件汇集在同一处构成转动副。真实的转动副数是构成该复合铰链的构件数减 1。虚约束是在特定的几何条件,或结构条件下,重复引入的约束,是不起独立限制作用的约束。
1.计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出: 2.计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出: 3.计算图示机构的自由度,如有复合铰链、局部自由度和虚约束,需请明确指出。图中 DE 平行且垂直FG: 扫码下方二维码添加课程顾问
即可详细了解课程价格/内容
|